
This research develops a brain-inspired optical imaging system that mimics human vision to reconstruct objects hidden by fog, smoke, and biological tissue. Combining event-based cameras, spiking neural networks, and neuromorphic processors, it enables fast, energy-efficient imaging with applications in autonomous vehicles, emergency response, and non-invasive medical diagnostics.

This research teaches AI to understand and generate the sense of touch by combining visual information with high-resolution tactile data. The technology enables realistic digital textures, improves online shopping, enhances virtual experiences, and creates accessible tactile graphics for blind and low-vision users, making AI more inclusive and human-centred.

2026
This research develops adaptable machine learning methods for wildlife monitoring using camera trap images. By clustering visually similar animal images, the system dramatically reduces the amount of manual labeling required while maintaining accuracy. The approach could enable faster, large-scale biodiversity monitoring critical for protecting endangered species worldwide.

2026
This research uses computational photography and machine learning to monitor electricity quality through the flickering patterns of everyday lights. By analyzing images captured in cities such as Kampala and Nairobi, the work offers a low-cost method for measuring voltage instability and improving power-grid planning in underserved communities lacking reliable electricity infrastructure.
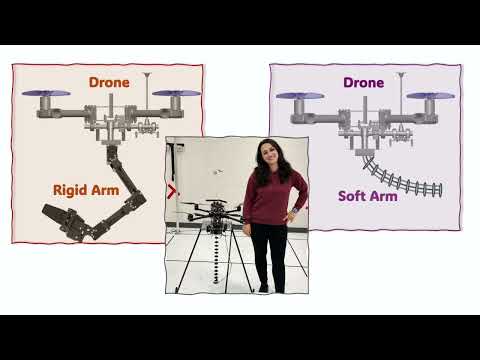
This research develops drones with soft robotic arms capable of safely grasping and transporting objects in challenging environments. By combining predictive modelling with visual feedback, it overcomes control challenges associated with soft materials. The work advances intelligent, adaptive aerial robotics for applications such as emergency delivery and hazardous environments.

This research develops reliable AI-powered drone systems to support New Zealand’s Predator Free 2050 initiative. By improving neural network calibration, uncertainty estimation, and robustness in challenging real-world conditions, the project aims to accurately detect invasive predators and better protect endangered native bird species.
2025
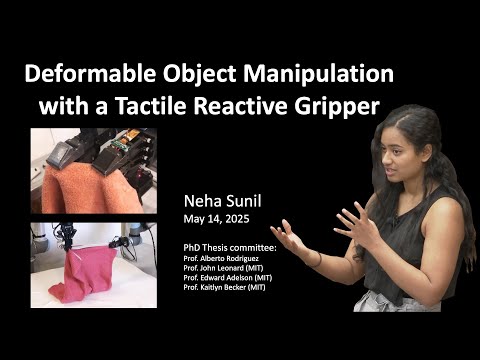
This research presents a modular visuotactile robotic system for manipulating deformable objects such as cables, towels, and garments. Unlike rigid-object manipulation, deformables pose challenges due to occlusion, complex dynamics, and high variability. The system combines vision for global context and tactile sensing (GelSight) for precise local control, enabling tasks like cable tracing, cloth edge following, towel folding, and garment handling. It uses reactive control, learned dynamics (LQR), affordance models, and dense correspondence to generalise across tasks and objects. A key innovation is shifting from global state estimation to local, feedback-driven manipulation, improving robustness, efficiency, and real-world applicability in domains like manufacturing, healthcare, and assistive robotics.

2025
This PhD uses brain-inspired AI to decode vision from neural data. Using human fMRI (24 hours of Doctor Who) and monkey electrophysiology, signals are transformed into 2D brain maps to improve reconstruction. The model learns receptive-field structure, compares contributions of V1/V4/IT, and aims for efficient, interpretable decoding with applications to neuroscience and BCIs.
Traditional neural networks are powerful but difficult to interpret and vulnerable to small input changes. This research develops wavelet-based neural networks with provable stability guarantees, extending the scattering transform to texture modeling. The approach reduces feature complexity while improving interpretability, enabling more reliable and mathematically explainable AI systems.
2025
Marine debris severely harms ocean ecosystems, yet most cleanup focuses only on floating waste. This research develops underwater robots equipped with specialized computer vision to detect and remove submerged trash. By training algorithms for challenging underwater conditions, the work enables safer, scalable cleanup operations and supports long-term ocean preservation.