
Industrial combustion residue can strengthen concrete but varies in impurity content. This research uses X-ray imaging and computer vision to identify and quantify impurities in residue particles. The results help cement manufacturers optimize material use, improving quality, reducing costs, and supporting sustainable recycling of industrial waste.
2025
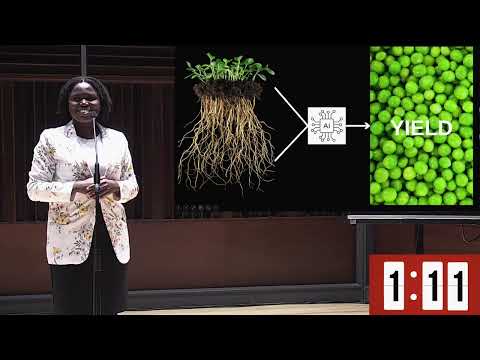
My research uses field images to predict crop yield, leveraging machine learning techniques to extract patterns and features correlating yield. These features include plant health indicators, growth stages, or canopy coverage. I am particularly interested in using these features to develop models that improve the accuracy of yield prediction, helping farmers make data-driven decisions. My approach considers temporal changes in the crop, capturing how its characteristics evolve. My work contributes to precision agriculture, a field that seeks to optimize resource use, increase productivity, and promote sustainability in farming. My research has the potential to transform traditional agricultural practices by integrating advanced AI methods.
Mel-AI is an artificial intelligence system designed to assist pathologists in distinguishing melanoma from benign moles. By training computer-vision models on 520 cases, the system reached 96% accuracy and interpretable outputs. It offers scalable, objective quality assurance, reducing misdiagnosis risk and improving melanoma detection in high-incidence countries like Australia.