
This research investigates geometric surfaces with prescribed mean curvature, inspired by the physics of bubbles. By constructing new mathematical surfaces from spheres and unduloids, it explores how curvature changes under motion, providing new insights into differential geometry and the mathematics that precisely describes physical phenomena.
2025
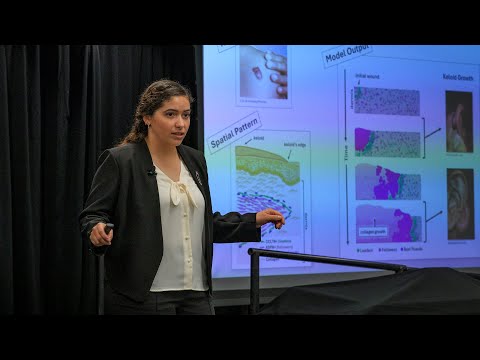
This research uses agent-based mathematical modelling to study keloid scar growth. By simulating interactions among collagen, immune cells, and key scar-associated cell types, the model predicts how keloids expand without requiring harmful patient experiments. The approach may guide future treatments for keloids and broader skin-healing conditions.

This research uses differential equations to model how people move between law-abiding life, crime, and incarceration. By simulating rehabilitation, overcrowding, and policy changes, the work shows how prisons can sometimes produce crime—and how evidence-based mathematical models can guide smarter decisions that reduce crime and build safer communities.

This research develops mathematical models to understand how honeybee clusters survive extreme cold without their hive. Using temperature and density equations, the model predicts how bees move, generate heat, and form insulating layers. Accurate simulations could reduce harmful field experiments and provide biologists with a powerful tool for studying bee behaviour.

This research quantifies the uncertainty in chaotic systems, showing why long-term predictions — from planetary motion to weather patterns — become unreliable. By developing mathematical models that capture chaotic behaviour, the work supports applications in traffic flow, wireless communication, climate forecasting, and disease spread, revealing why some systems are inherently more predictable than others.