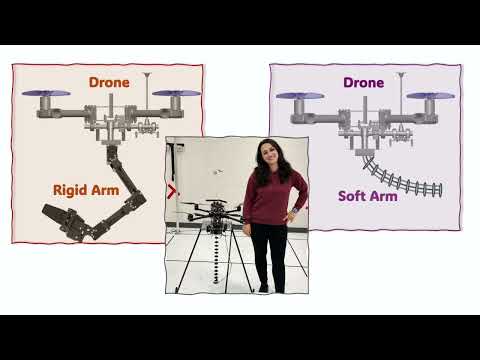
This research develops drones with soft robotic arms capable of safely grasping and transporting objects in challenging environments. By combining predictive modelling with visual feedback, it overcomes control challenges associated with soft materials. The work advances intelligent, adaptive aerial robotics for applications such as emergency delivery and hazardous environments.
This research develops soft robots using liquid crystal elastomers that act as artificial muscles. By designing materials at the molecular level and 3D printing them into responsive structures, researchers can create flexible robots that move like animals. These soft robots could navigate tight spaces during search-and-rescue missions after disasters.

This thesis introduces Armando, a low-cost soft robotic gripper with proprioceptive sensing using a single flexible capacitive sensor and neural-network decoding. Achieving 99% accuracy, Armando enables precise finger-position estimation for applications in prosthetics, assistive care, and disaster response, advancing accessible tactile robotics inspired by human touch.